6 axis force/torque transducer - 400 N / 20 Nm to 1200N / 60Nm - robotics


- type: 6-axis force- torque sensor;
- nominal force: Fx, Fy: 200 N, Fz: 400 N / Fx, Fy: 600 N, Fz: 1200 N;
- nominal torque: Mx, My, Mz: 20 Nm / Mx, My, Mz: 60 Nm;
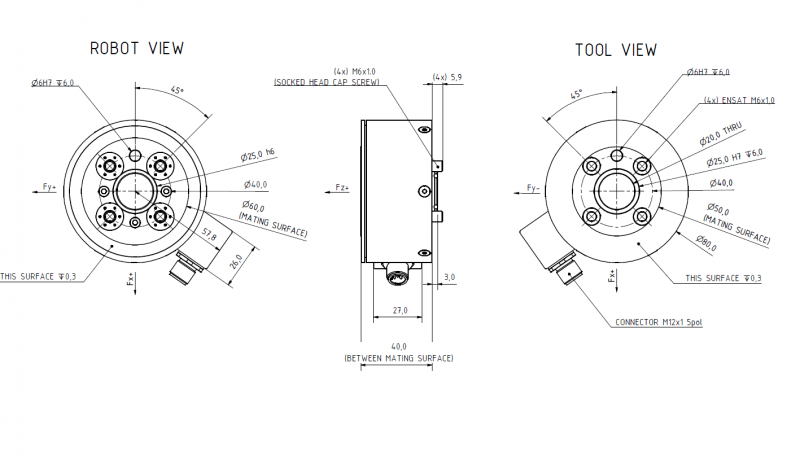
- mounts on robot arm (norm DIN ISO 9409-1)
- accuracy class: 1%;
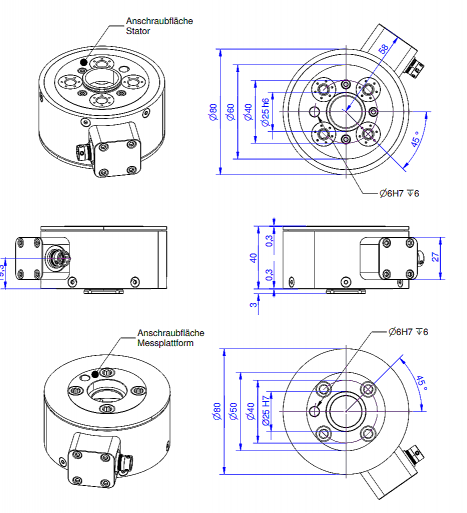
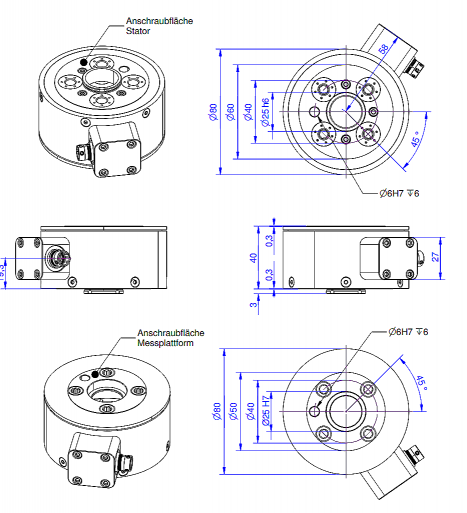
- dimensions: Ø100 mm x 40 mm;
- circle: Ø50 mm;
- mounting and centering: 4 x inner thread M6x1, 2 drill hole Ø6 mm H7;
- Connection: integrated circular connector (MP11), 24-pin, male;
- material: aluminium alloy;
- drawing is sent on request
- IP64 aluminum construction
- Weight: 320 or 730g
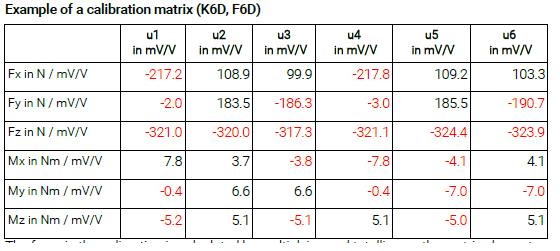
- Calibration certificate and 6x6 inter-channel matrix included
Download the product datasheet
Introduction
The F6D100-50 and F6D100-50e 6-component force transducers simultaneously measure Fx, Fy, Fz forces and Mx, My, Mz torques on three perpendicular axes. Each load cell incorporates 6 independent strain gauge force transducers and mounting flanges conforming to DIN ISO 9409-1 for direct mounting on the arm of a robotic manipulator, without additional flanges or adapters. This means that the total footprint on the robot arm is much smaller than that of the K6D series.
The two sensors F6D100-50 and F6D100-50e are available in two measuring ranges:
- Version 1: Fx/Fy: 200N, Fz: 600N, Mx/My/Mz: 20 Nm
- Version 2: Fx/Fy: 400N, Fz: 1200N, Mx/My/Mz: 60 Nm
The output signal of the F6D100-50 is a non-amplified analog voltage, while the F6D100-50e incorporates on-board electronics with CAN interface.
The forces are applied on the contour (Ø100-Ø50). The central part is not loaded. The contact surfaces are designed for optimized force transmission, allowing to reduce the overall accuracy to 1% (after decoupling), and the sensitivity to transverse forces (crosstalk) to 1%.
Each transducer is delivered with a factory calibration certificate and a 6x6 inter-channel coupling matrix. Calibration to specific ranges is available as an option, as well as ISO-17025 calibration.
Installation
The F6D100-50 and F6D100-50e 6-component force transducers are mounted directly on the robot arm, between the robot and the tool, without any additional flange or adapter.
The introduction of the forces and the fixation to the robot arm are realized by 4 M6 tappings + 2 centering pins Ø6 mm H7.
The sensor is powered in 5 VDC and delivered with a 12 pin (F6D100-50) or 5 pin (F6D100-50e) MP11 connector. The operating temperature range is -10 to 85°C. The sensor is delivered with a 24 pins connector.
Conditioning, Acquisition, Use of the decoupling matrix
Analog model F6D100-50
The acquisition of the raw measurement signals is done with :
- a PC or PLC acquisition system equipped with a strain gage bridge input card
- or via a conditioning module for strain gage bridge with analog or digital output, then a PC or a standard acquisition system.
The inter-channel decoupling matrix is implemented in the conditioning or acquisition module.
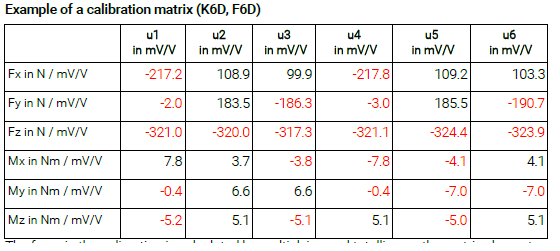
The real efforts are obtained by multiplying the 6x6 decoupling matrix (M) by the vector I containing the 6 output signals of the F6D100-50. The origin of the reference frame in which the measured forces are projected is generally the center of the contact surface (see documentation). After neutralization of the intervoice effects, a force applied on one axis will result in a force variation on only one axis. The accuracy of the measurement is thus improved by a factor of 5 to 10.
PM Instrumentation recommends the GSV series of digital interface conditioning modules for their simplicity of use, their accuracy and their ability to take into account decoupling matrices:
- the GSV-8DS (High performance module, 8 analog inputs) or its ruggedized version GSV-8AS, which can be optionally equipped with a datalogger
- the GSV-6LTE, equipped with a data logger and wireless connectivity
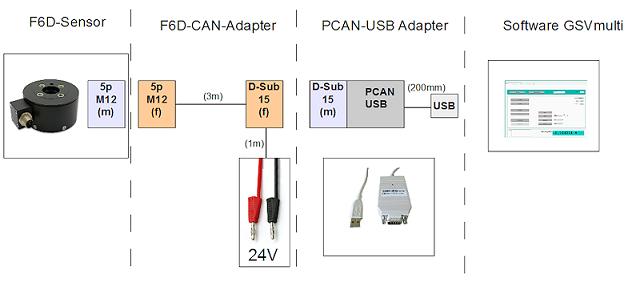
Model F6D100-50e with CAN interface
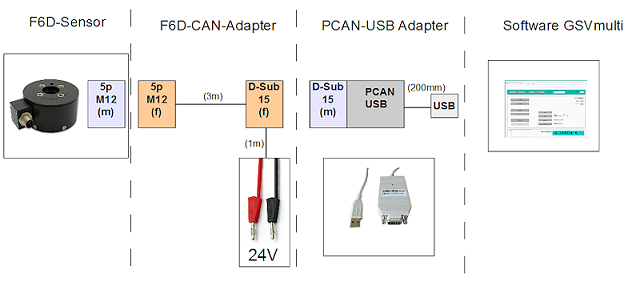
This model integrates an embedded electronics performing the conditioning of the strain gages, the amplification, the application of the inter-channel matrix, the analog/digital conversion (16-bit) and the CAN interface (proprietary communication protocol)
A visualization and acquisition software is included with these modules (GSV-multi). Dll and VI files are also provided for application development under Labview or in C / Visual Studio / C++ / .net.
The use of GSV multi with the CAN interface sensor requires a CAN / USB converter.
Application
The multi-component force sensor is very well suited for use in robotics, e.g.
- For collision detection
- "Teach-In" Collision detection
- Force or torque-controlled operation
- Type
- 6 axes robotics
- Measuring Range
- 600 , 1200
- Number of Axis
- 6 Axis
- Precision (max error)
- 1 %
- Nonlinearity (% FS)
- ± 0.1 %
- Hysteresis
- 0.1 % FS
- Operating temperature range
- -10 to 85 °C
- Analog output signal
- non-amplifié
- Output Signal
- 0.4 mV/V
- Tension d'alimentation
- 5 Vcc
- Measurement direction
- Traction & Compress.
- Housing
- Aluminium
- Protection Class
- IP64
- Measuring Range (Force)
- ⩽ 1 kN, 1 - 100 kN
- Application
- OEM, Robotics
-
 Datasheet_F6D100-50e.pdf
Datasheet_F6D100-50e.pdf
-
Datasheet_F6D100-50e-200N-20NM_pmi_EN.pdf
-
Datasheet_F6D100-50e-600N.60Nm_pmi_EN.pdf
-
Datasheet_F6D100-50e-600N.60Nm-mp11_pmi_EN.pdf
-
Datasheet_F6D100-50-200N20N-mMP11_pmi_EN.pdf
-
 Manuel-utilisateur-k6d130_en.pdf
Manuel-utilisateur-k6d130_en.pdf
-
Calibration-option-Matrix-Plus.pdf
-
k6d-configuration.pdf
-
 F6D100_000_K.pdf
F6D100_000_K.pdf
- Calibration custom, ISO-17025
- Cable and connection for GSV
- Temperature compensated calibration
- TEDS
Related products

K6D68

GSV-8DS

F6D45
